





Tempest
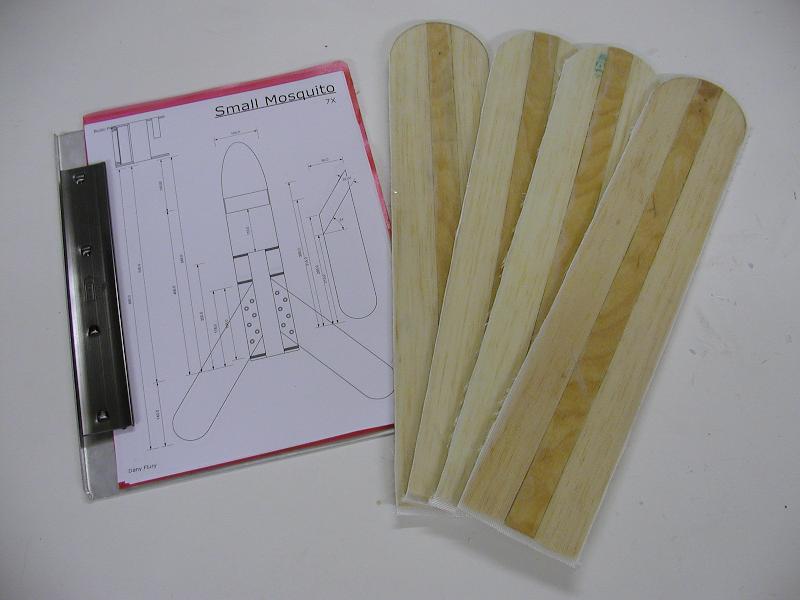
Als Basis für das "Long-Burn" Projekt wird das PML-Kit (Tempest Hybrid Ready) verwendet.
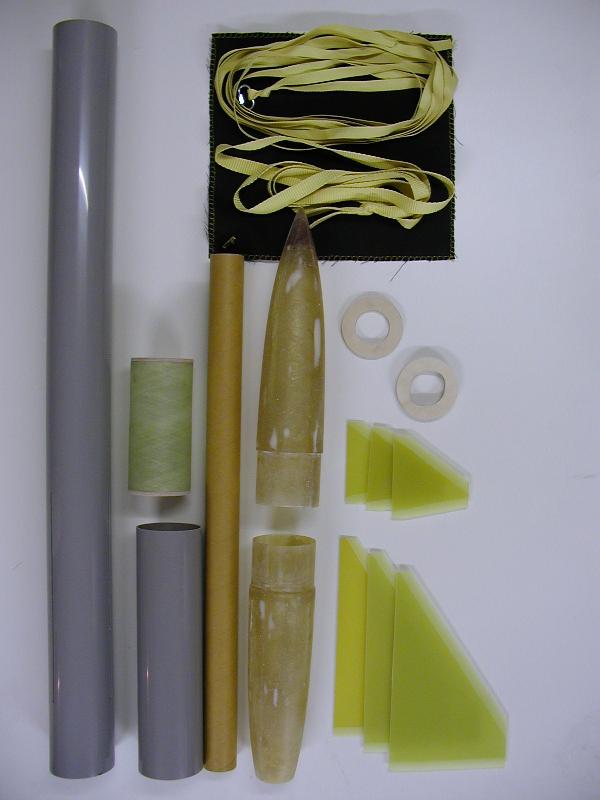
Ziel: Flug auf J90 (54/852) Flughöhe: ca.1700m !Folgendes Bild zeigt die Bausatz-Komponenten:

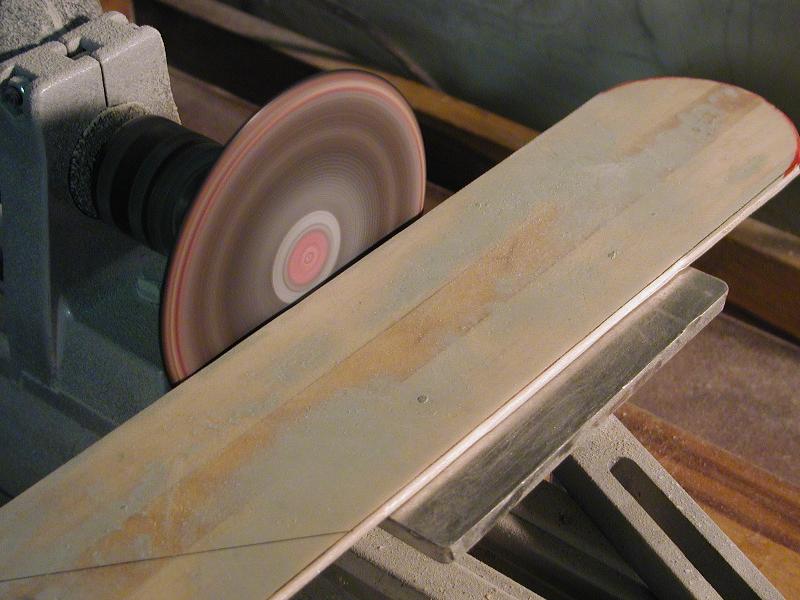
Als erstes werden Rohre verglast:
- 1 Lage 160-er und
- 1 Lage 49-er Glasgewebe


Das originale Motorrohr (91.44cm) wurde auf 30.5 cm gekürzt:


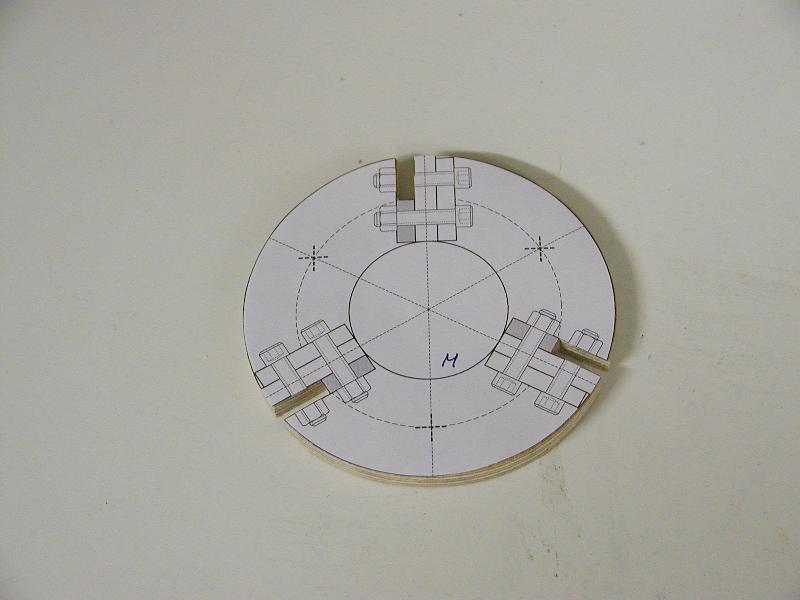
Folgendes Bild zeigt, wie wenig Platz zwischen Motorrohr und dem Körperrohr vorhanden ist, die Zentrierhilfen für die Flossen sind nur zum ausrichten, haben also keine tragende Funktion:

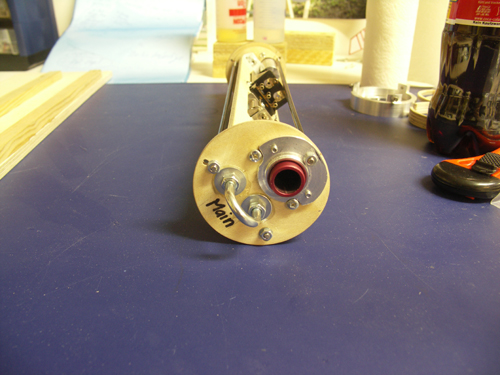
Für den Motorretainer musste eine Lösung aus dem "vollen" entstehen.
vorher:

nachher:

Und nach einwenig feilen und schleifen sieht der Retainer so aus:

Ein passender Centerring musste angefertigt werden.

Hier noch einige Bilder vom drehen:



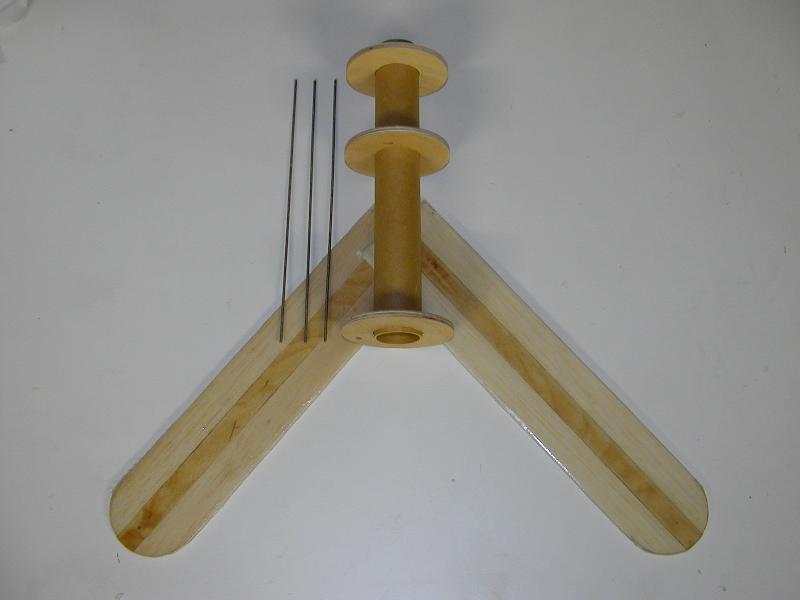
Einzelteile des Bosters:

Boster mit 54mm Motor und Retainer:

Einwenig eng !

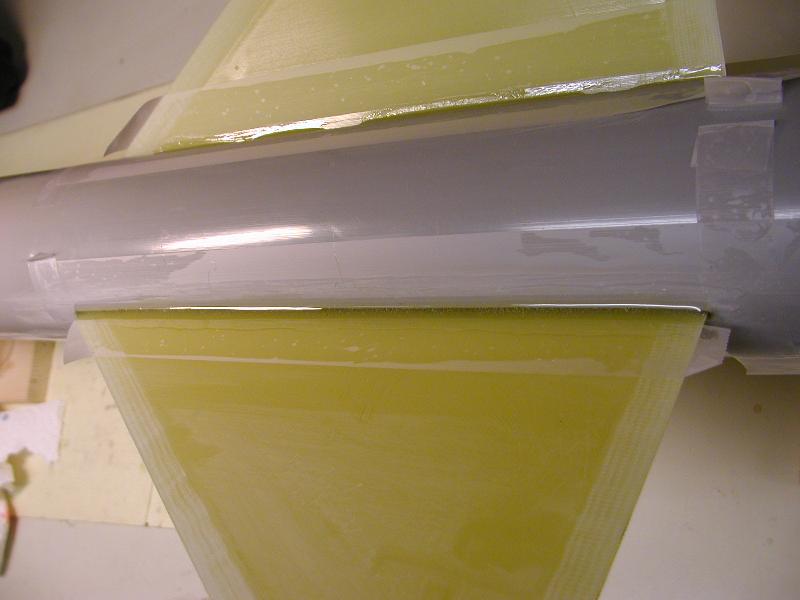
Die Flossenwurzeln wurden mit Matthias"Normfinger"angeleimt:

Die Flossen wurden mit 2-Ton( 2K-Leim) auf das Motorrohr geleimt. Der Zwischenraum (Motorrohr/Körperrohr) wurde ausgeschäumt.
Die Leimresten werden natürlich noch entfernt.Sieht danach aus, als ob eine Schnecke über das Ende der Rakete gekrochen wäre.
Bevor der Centerring eingesetzt wird, wurde vorher Leim angebracht. Die Flächen werden immer sehr gut (80-er Schleifpapier) angeschliffen.

Fertiger Boster mit Retainer
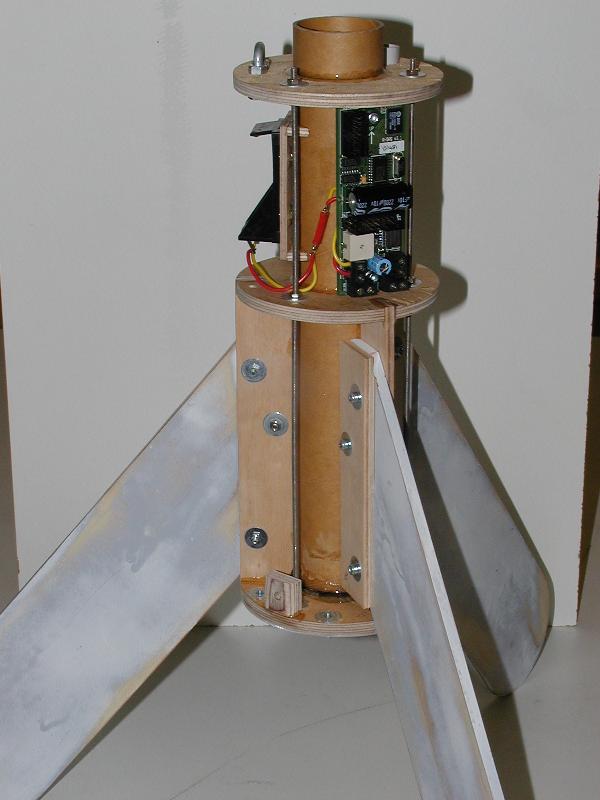
Die Railgides wurden auf Gewindeplättchen, die auf das Körperrohr geleimt wurden (2-Ton 2K-Leim) montiert.
Diese Methode wurde schon oft angewendet und es traten bisher keine Probleme auf.

Ansicht von oben, vertieft eingeleimter Bulkhead:

Nun zur Payload-Section:
Die Bergung wird 2-stufig erfolgen (CPR-System/PML)
Verwendete Elektronik: 1x G-Wiz Deluxe 1x Blacksky Timer2N (Backup/Drogue). Die Auswurfladung (SP) wird mittels Safeject (von Jürg erhältlich) erfolgen.


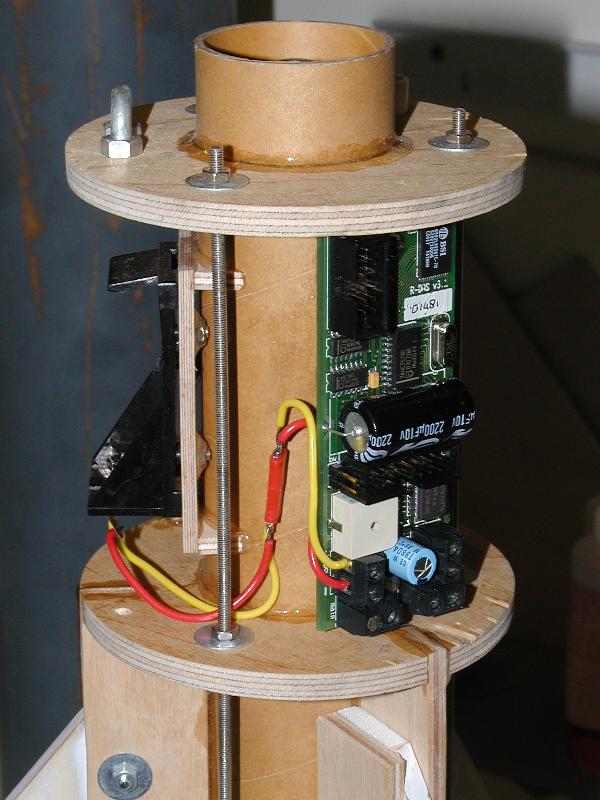
In diesem Rohr befindet sich die Elektronik. Es dient gleichzeitig zum befestigen am Payloadrohr, mittels 6 M4 Einschlagmuttern, die jeweils 120°verteilt sind.
2.Bild Payloadrohr mit montierter Elektronik


Die mitgelieferte Spitze ist eine Intelli-Cones, sie wurde konzipiert um eine Elektronik oder ähnliches zu transportieren.
Geplant ist ein Sender, um die Rakete besser zu orten.


Folgende Bilder zeigen das lackieren der Rakete.
Als erstes wurde mit 2-K Füllprimer Grundiert (keine Bilder vorhanden)
Danach schleift man, bis sich Schweisstropfen auf der Stirn bilden.
Gelb habe ich mir gedacht soll auf die Rakete, so soll es sein.
Auf dem 1.Bild ist eine Bohrung am hinteren Ende des Bosters zu erkennen, sie dient zum befestigen des Retainers.


Auf diesem Bild sind 2 Bohrungen zu erkennen. Die Bohrung am Ende ist für die Shear Pin`s http://www.argoshpr.ch/KnowHow/Recovery_d.htm
Die zweite als Druckausgleich (verhindert vorzeitige trennung der Spitze) bzw. Hauptschirm am Gipfelpunkt.

Bevor die 2.Farbe lackiert werden kann muss abgedeckt werden.



Als zweite Farbe habe ich orange-rotlackiert.



Nachdem das Abdeckband entfernt war kam folgendes zum Vorschein.



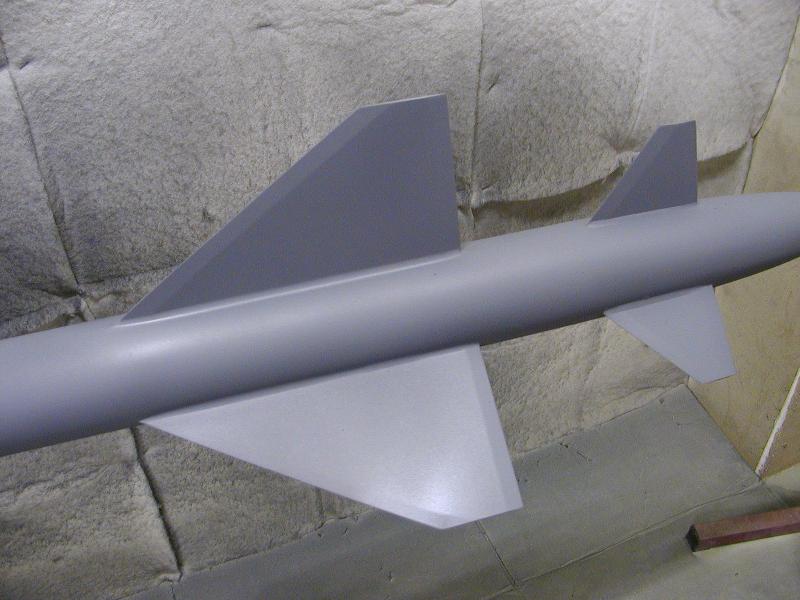
Fertige Rakete vor dem Klarlacken.

Die Rakete ist jetzt fertig lackiert.


Hier noch einige Bilder vom Bergungssystem (Fallschirme/Piston/Leinen)



Nahaufnahme Elektronk-Bay (Schlaufen selber genäht):


Motorisierung I-161: Erreichte Höhe gemäss G-Wiz Deluxe: 598m (gerechnet 613m). Bergung 2-Stufig war erfolgreich !



Ich muss noch einen Nachtrag zu dem Baubericht bemerken.
Der Erstflug ist zwar schon eine weile her und hat wie beschrieben gut funktioniert.
Leider habe ich nach dem Flug einen Schaden am Payload-Rohr festgestellt.
Es war sehr schwer festzustellen woher er war. Es sah so aus als ob von innen her etwas gegen die Innenwand geschlagen hat.
So war es auch wenn man den Baubericht durchschaut wird man ein Bild der El.-Bay inkl. Leinen und Befestigungsschäkel finden.
Hier lag das Problem:
Der Schäkel der auf dem Piston liegt ( und Piston und Spitze verbindet ) wurde durch beschleunigen des Pistons beim Ausstoss gegen die Innenwand geschlagen (vermutlich schraubbarer Teil des Schäkels).
Da ich die Rakete am folgenden Mini ALRS im kommenden März fliegen möchte (werde) Laughing wie geplannt auf einem AT J90 musste ich sie erst reparieren.
Folgende Frage die sich für mich stellte waren:
Payload-Rohr komplett neu bauen oder reparatur des defekten Rohres.
Nach einigen Diskussionen und Kaffe`s im Bastelkeller in Schlieren habe ich mich entschlossen das Rohr zu reparieren.
Leider habe ich keine Bilder der Reparatur gemacht.
Die defekte Stelle habe ich mit dem Dremel frei gemacht. Anschliessend habe ich 2K 2-Ton Epoxy eingeschwemmt und über Nacht trocknen lassen.
Danach folgten 2 Schichten Glas, das Finish wurde alles wie im Baubericht beschrieben neu gemacht.






















































{kind=link}